












See Part I of this series to get started with the Statistical terms and concepts used in Kalman Filter.
Equations in Kalman Filter
Kalman Filter is a type of prediction algorithm. Thus, the Kalman filter’s success depends on our estimated values and its variance from the actual values. In Kalman Filter, we assume that depending on the previous state, we can predict the next state.
At the outset, we would like to clarify that this article on the Kalman filter tutorial is not about the derivation of the equations but trying to explain how the equations help us in estimating or predicting a value. Now, as we said earlier, we are trying to predict the value of something which cannot be directly measured. Thus, there will obviously be some error in the predicted value and the actual value.
If the system itself contains some errors, then it is called measurement noise. For example, if the weighing scales itself shows different readings for the same football player, it will be measurement noise.
If the process when the measurement takes place has certain factors which are not taken into account, then it is called as process noise. For example, if we are predicting the Apollo Rocket’s position, and we could not account for the wind during the initial blast off phase, then we will encounter some error between the actual location and the predicted location.
Kalman Filter is used to reduce these errors and successfully predict the next state.
Now, supposing we pick out one player and weigh that individual 10 times, we might get different values due to some measurement errors.
Mr. Rudolf Kalman developed the status update equation taking into account three values, ie
- True value
- The estimated or predicted value
- Measured value
Status update equation
The status update equation is as follows:
Current state estimated value
= Predicted value of current state + Kalman Gain * ( measured value – predicted value of the state)
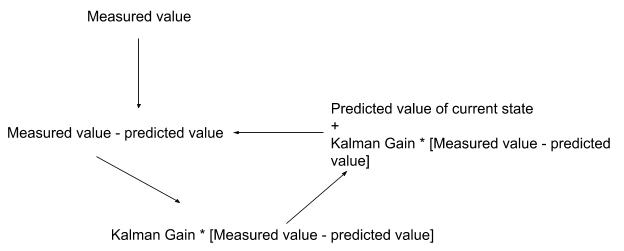
Let us understand this equation further.
In our example, we can say that given the measured values of all ten measurements, we will take the average of the values to estimate the true value.
To work this equation, we take one measurement which becomes the measured value. In the initial step, we guess the predicted value.
Now since the average is computed, in this example, the Kalman gain would be (1/N) as with each successive iteration, the second part of the equation would be decreasing, thus giving us a better-estimated value.
We should note that the current estimated value becomes the predicted value of the current state in the next iteration.
For now, we knew that the actual weight is constant, and hence it was easy to predict the estimated value. But what if we had to take into account that the state of the system (which was the weight in this case) changes. For that we will now move on to the next equation in the Kalman Filter tutorial i.e. State extrapolation.
Stay tuned for the next installment, in which the Rekhit will explain how to work with State extrapolation equation.
Download the full code: https://blog.quantinsti.com/kalman-filter/.
All data and information provided in this article are for informational purposes only. QuantInsti® makes no representations as to accuracy, completeness, currentness, suitability, or validity of any information in this article and will not be liable for any errors, omissions, or delays in this information or any losses, injuries, or damages arising from its display or use. All information is provided on an as-is basis.
Disclosure: Interactive Brokers
Information posted on IBKR Campus that is provided by third-parties does NOT constitute a recommendation that you should contract for the services of that third party. Third-party participants who contribute to IBKR Campus are independent of Interactive Brokers and Interactive Brokers does not make any representations or warranties concerning the services offered, their past or future performance, or the accuracy of the information provided by the third party. Past performance is no guarantee of future results.
This material is from QuantInsti and is being posted with its permission. The views expressed in this material are solely those of the author and/or QuantInsti and Interactive Brokers is not endorsing or recommending any investment or trading discussed in the material. This material is not and should not be construed as an offer to buy or sell any security. It should not be construed as research or investment advice or a recommendation to buy, sell or hold any security or commodity. This material does not and is not intended to take into account the particular financial conditions, investment objectives or requirements of individual customers. Before acting on this material, you should consider whether it is suitable for your particular circumstances and, as necessary, seek professional advice.